
Upgrading a gravity-based time/fill process by employing a closed-loop control scheme requires a certain amount of capital expenditure. Considering the increased profits that result from the improved technology, the additional cost is amortised in a very short period of time. This fill system has the added benefit of making changes to fill volumes relatively easy.
In filling operations, we rely on gravity to move liquid product from a product fill tank to final product containers or bottles. Typically known as a gravity-based time/fill process, the two constants are the force of gravity and a predetermined fill time.
A critical variable in this system is the head pressure of the liquid in the product fill tank. The delivery pressure, or head pres-sure of the liquid product is greatest when the tank is full. As the tank is emptied, the head pressure drops. The change in fill volume dispensed into each bottle is directly proportional to the head pressure in the product fill tank.
Typically, this filling process is one of averages. The actual desired volume is dispensed only when the tank is half-full. Theoretically, then, the bottle is overfilled when the product fill tank is full (highest head pressure) and underfilled when the product fill tank is nearly empty (lowest head pressure). This is called an open-loop control scheme, as there is no confirmation of the actual fill volume to a mechanism capable of compensating for the changing head pressure.
This method of filling bottles is relatively inexpensive to design, build and use, but it has several profit-robbing drawbacks. First, overfilled bottles directly translate to lost profits. If the overfill is too great, then product is spilled outside the bottle, adding to cleanup time and waste disposal costs. Underfilling is equally costly, as bottles with less than the minimum allowable volume are pulled off the packaging line and scrapped. This, too, adds to waste disposal costs as well as lost revenue for the product that gets thrown away. Variations in excess of 20 % are possible if the liquid level in the tank varies substantially.
Reduced variation
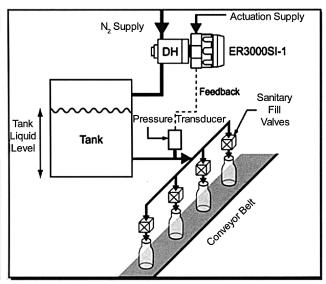
A variation of the gravity head-pressure, time-based filling system is to seal the product fill tank and pressurize it with nitrogen using a spring-loaded pressure regulator (Figure 1). The spring-loaded pressure regulator maintains a low positive pressure on the product in the tank. The gas pressure adds to the product head pressure, and therefore reduces the variation of the dispense volume as the liquid level in the tank changes. While an improvement over the gravity head-pressure system, this is still an open-loop control scheme, as changes in delivery pressure are not sensed directly by the spring-loaded pressure regulator, for which they cannot be completely compensated. Modern electronics have made it possible to control gas pressures to within 1 mbar of a desired setpoint.
The dispensing system in Figure 2 is a closed-loop system. Here, an ER3000 digital pressure regulator controls the nitrogen pressure in the product fill tank. An analogue pressure transmitter in the DH series is installed in the dispensing nozzles that fill the bottles. The transmitter senses the pressure in the dispensing nozzle and provides the electronic pressure controller with this feedback. The pressure controller constantly monitors the feedback from the transmitter and compares it to a reference value or setpoint. If there is any difference, or error, between the setpoint and the feedback, the pressure controller will adjust the nitrogen pressure in the product fill tank to compensate for, or eliminate, the error. Assuming that the controller monitors or updates the evaluated setpoint and feedback every 25 milliseconds, the pressure in the product fill tank is essentially held constant. Now the time/fill process becomes extremely accurate.
cpp 433
ER3000 electronic pressure controller
The ER3000 electronic pressure controller, combined with a wide range of pressure regulators, provides true distributed control of liquids or gases from vacuum to 1400 bar. As a stand alone unit, the ER3000 can control pressure of clean inert gases from 0 to 7 bar. It gives the system closed-loop feedback control with exceptional accuracy and response time. Depending on the application, the overshoot and transient time can be optimised by adjusting the proportional, integral and derivative control terms. The setpoint can be provided by an analogue or digital source. For recurring control operations, the regulator has the capability to run a pressure profile that can be uploaded from the software package. Communication between the pressure controller and a computer can be realised via a two-wire RS485 connection.
More about Tescom
Literature download
Share:



{kind=link}